Project 4A
Project 4AShoot and Digitize PicturesRecover HomographiesWarp the ImagesBlend images into a mosaicProject 4BHarris CornersAdaptive Non-Maximal SuppressionGenerate Feature DescriptorsMatch Feature DescriptorsRANSACWhat have you learned?
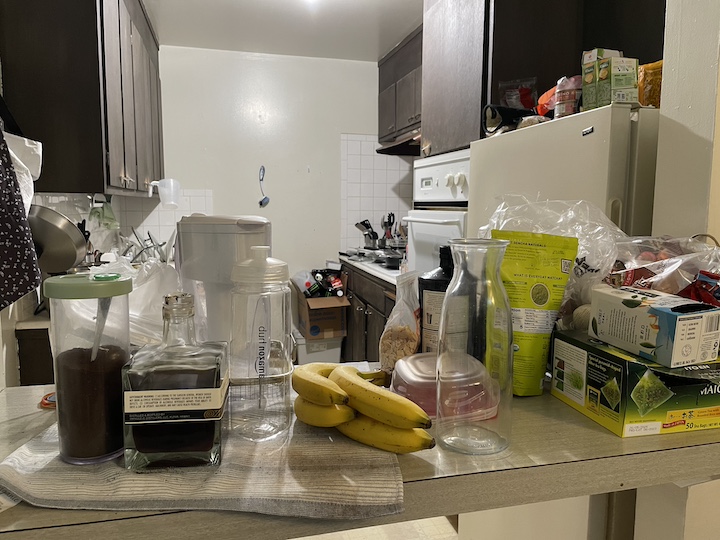
Shoot and Digitize Pictures
The pictures to merge are:
 |  |
|---|---|
| Kitchen (left) | Kitchen (right) |
 |  |
| Living room (left) | Living room (right) |
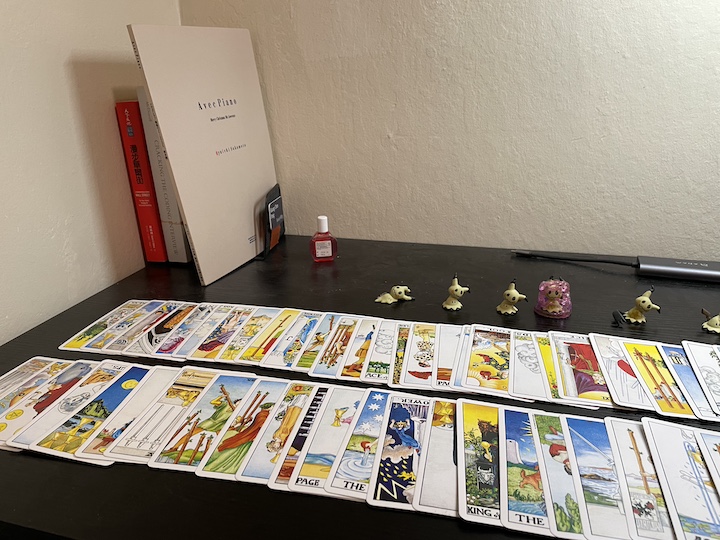 | 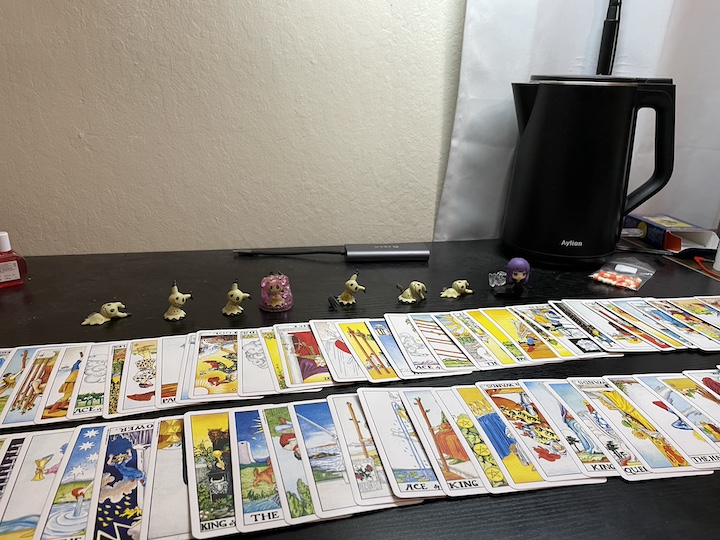 |
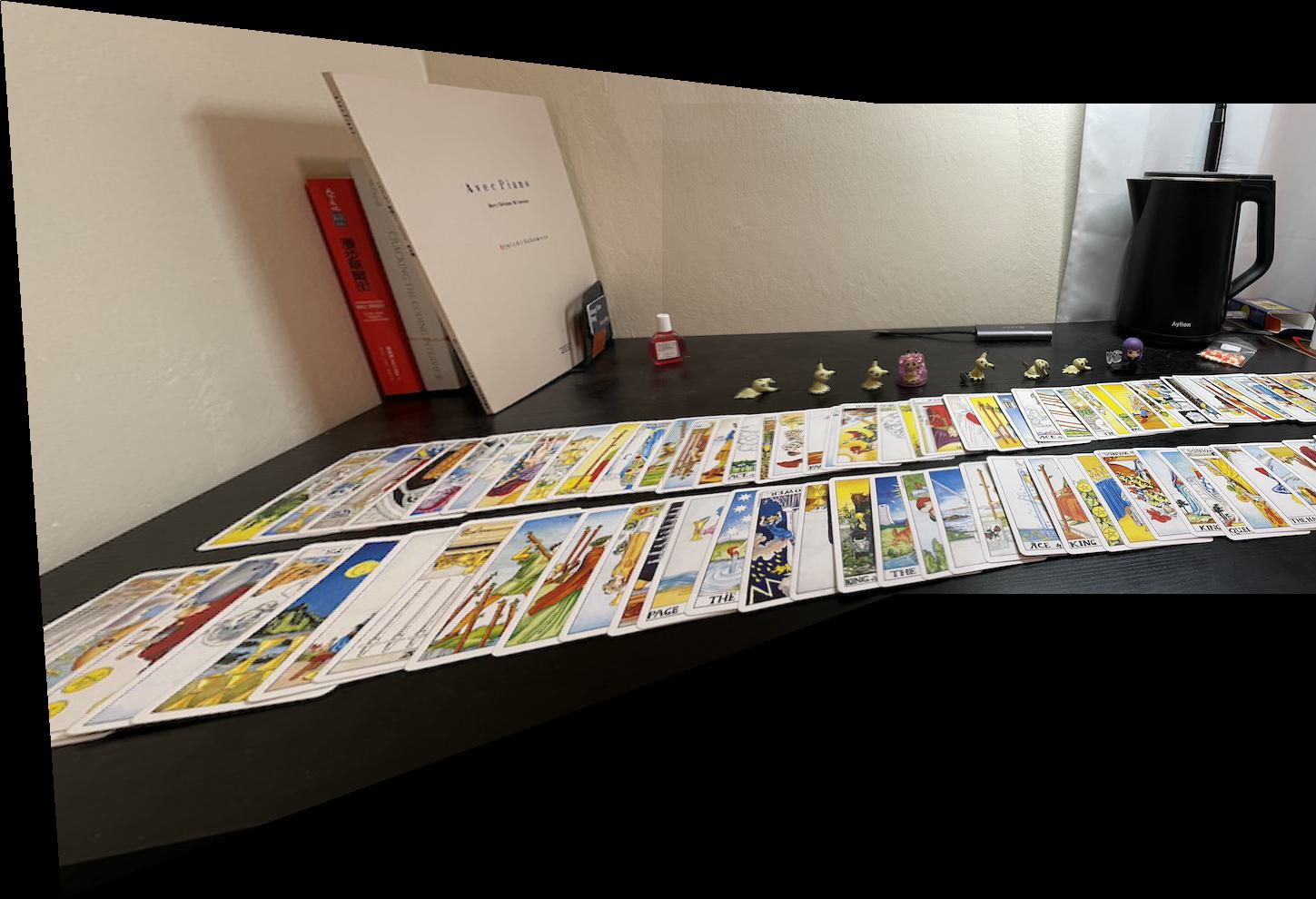
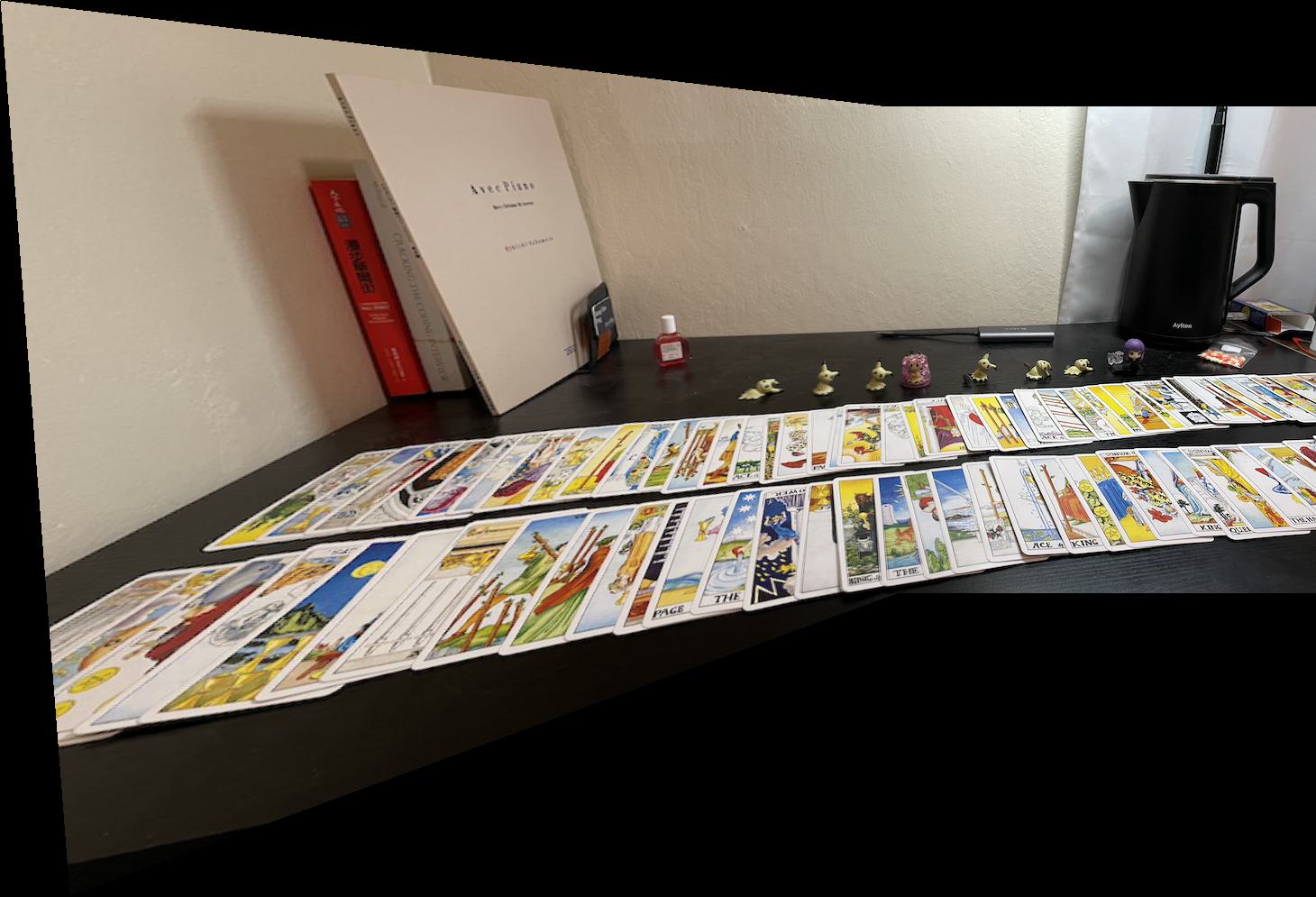
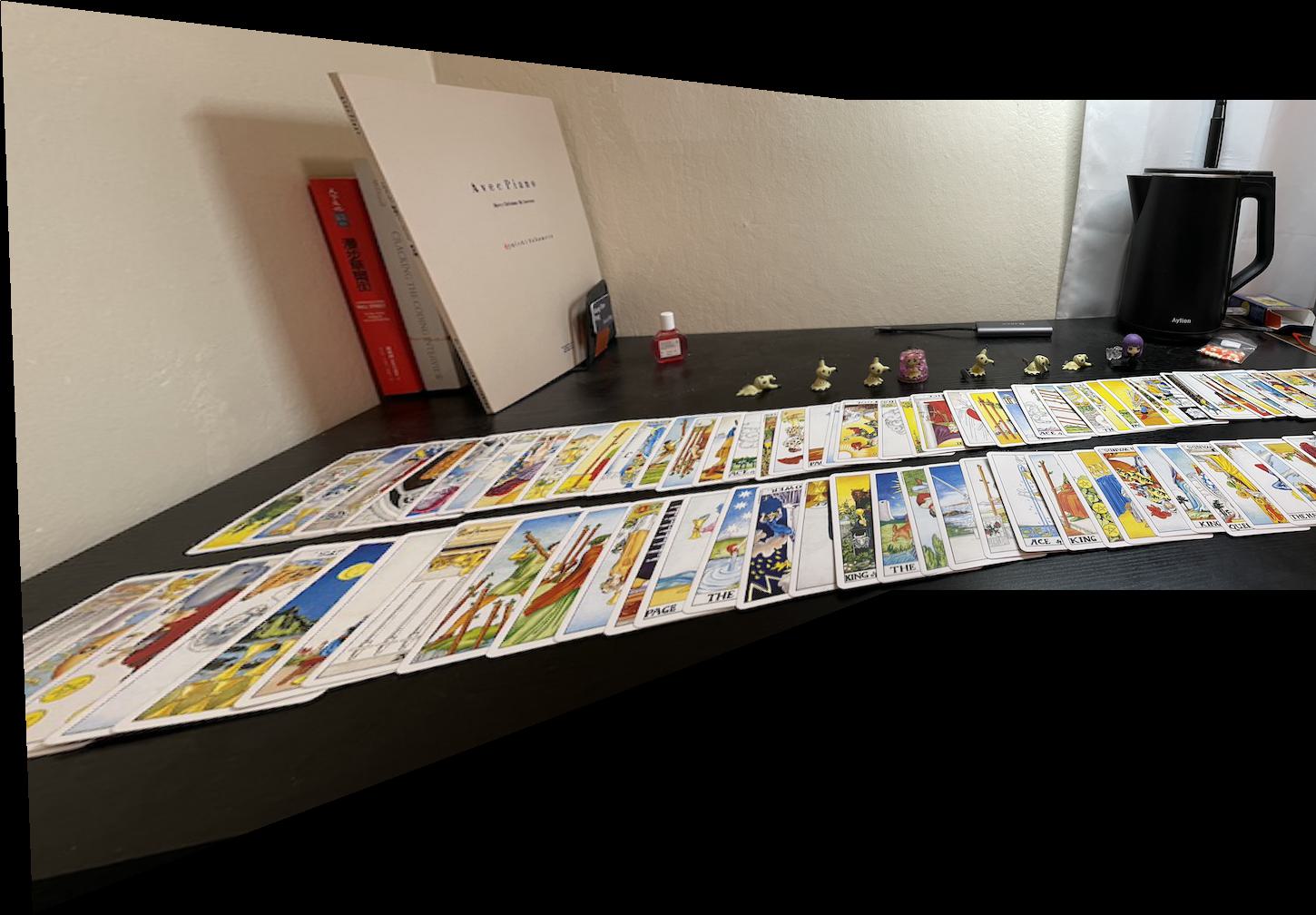
| Desk with tarot cards (left) | Desk with tarot cards (right) |
Pictures to rectify are:
 |
|---|
| Laptop (16:9) |
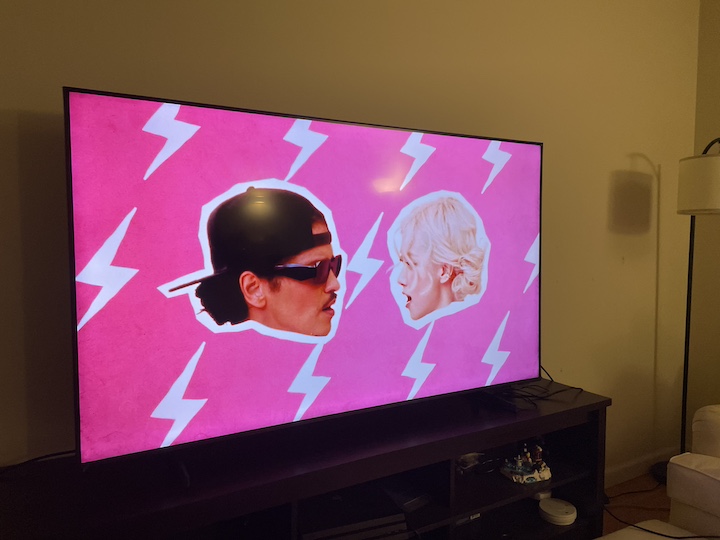 |
| Television (16:10) |
Recover Homographies
In this part, we want to find the matrix
, where
Expanding the equation, we have:
then solve the formula:
Now we can use the least square errors to estimate the matrix
Warp the Images
After computing the matrix
The coordinates after inverse warping should be translated to fit in a new canvas. Therefore, I find the minimal
We are able to rectify the images now:
|  |
|---|---|
| Television | Rectified television |
|  |
| Laptop | Rectified Laptop |
Blend images into a mosaic
Finally, we can build a panorama by warping corresponding points to the same coordinates.
I first tried naive averaging in the intersecting part of two images:
 |
|---|
 |
 |
The naive averaging didn't give preferable results, specifically, there are clear lines resulting from naive averaging in the blended image.
Therefore, I used the weighted averaging as my second approach. The weights of intersecting parts are determined by a linear function, where the leftmost part has a weight of 0 and the rightmost part has a weight of 1. The weighting masks of the second image are shown below:
 |  |
|---|---|
| Left mask | Right mask |
The subtle noises on the right mask resulted from the way I implemented it. I construct the mask by mask = np.any(image, axis=2). Thus, the black pixels in the image would generate the black pixels on the mask. However, it has no negative effect on our blending since the pixels are black and no blending is needed in those black pixels.
The results are:
 |
|---|
 |
 |
The quality of the panoramas is much better than the naive averaged one.
Project 4B
In part B, the objective is to create a automatic stitching algorithm. It consists of several steps:
Detect corner features using Harris corner detector
Reduce feature points with Adaptive Non-Maximal Suppression (ANMS)
Extract feature descriptors from each feature point
Match feature descriptors
Use RANSAC to compute a homography
Harris Corners
I first applied Harris corner detector to find the feature points that look like corners. This resulted in many feature points in images.
 |  |
|---|
Adaptive Non-Maximal Suppression
Since there is too many feature points from the previous step, I used Adaptive Non-Maximal Suppression (ANMS) to reduce the feature points but also keep the "useful" points that uniformly spread in the image.
I computed the pair-wise L2 distance for each feature points, and update the supression radius by the formula given by paper:
Then, I set the minimum supression radius with the 200th largest suppression radius to find 200 "useful" feature points from the images.
 |  |
|---|
Generate Feature Descriptors
The feature descriptor of each feature point is a 64-dimensional vector. For each feature point, I used its surrounding, axis-aligned
It looks like:
Match Feature Descriptors
I computed pair-wise L2-distance of feature descriptors, and only retained the feature descriptor pairs
, where
Furthermore, I used Lowe's 1-NN/2-NN algorithm to filter out noisy pairs. I chose the pairs with
 |  |
|---|
RANSAC
Finally, I implemented RANSAC to give a robust homography. As described in the lecture, I randomly sampled 4 pairs, computed the homography, counted the inliers, and used the largest inlier set to compute the final homography.
After doing RANSAC, we're able to mosaic the images now.
Belows are the final results:
 | |
|---|---|
| Auto | Manual |
 | |
| Auto | Manual |
 | |
| Auto | Manual |
What have you learned?
I found that it is very interesting to use a random algorithm (RANSAC) to generate robust results. The power of randomness is amazing.