CS 280A HW1 Report
CS 280A HW1 ReportProblem FormulationProblem ExampleMethodExhaustive Search Image PyramidMatch Score MetricsL2-Distance (Euclidean Distance)Dot ProductCanny Edge DetectionMethod PseudocodeBells & WhistlesAutomatic CroppingAutomatic White BalanceResultOffset TableOther Images
Problem Formulation
Given three unaligned color channels (RGB) of an image, find a good alignment for them and generate the aligned image.
Problem Example
Given an image like this:

Our goal is to place them together and generate a full-color image:

In contrast, placing them together without any optimization yields:
Method
In this section, we will introduce each procedure of the final algorithm, including:
Exhaustive search
Image pyramid
Match score matrics
L2-distance (Euclidean distance)
Dot product
Canny edge detection
Finally, we will give the full picture of the solution at the end of this section.
Exhaustive Search
Given two unaligned channels, we search over the pre-defined displacement window (in our implementation, it is [-18, 18] pixels,) scoring each displacement with a score matric, which we'll discuss later, and choosing the one with the highest score.
Note that in this procedure, we score the channels for
Image Pyramid
Image pyramid rescales the original image in multiple sizes and exhaustively searches from the smallest image to the original image. Once we find a displacement on a small image, we can narrow down the search window and apply it to a larger image. The process repeats until we find the displacement on the original image.
In our implementation, we rescale images by a factor of 2, and the smallest rescaled is no larger than 100000 pixels. Formally, for a
For convenient nomination, let
Match Score Metrics
The next question is, how to define a "good alignment" between two channels? Since the channels were derived from the same image, we assume that a "good alignment" makes the two channels "similar". In this section, we'll introduce two pixel-based metrics (L2-distance and dot product) and one hybrid metric (Canny edge detection).
L2-Distance (Euclidean Distance)
A straightforward intuition for measuring the similarity of two channels
Note that we take the negative sign to make sure that the higher score represents the higher similarity.
However, we didn't use Euclidean distance in our final implementation since it doesn't give a favorable result.
Dot Product
Another method is to compute the dot product
Canny Edge Detection
The above pixel-based metrics assume that in a "good alignment", the value of each corresponding pixel pair shares the same pattern. In Euclidean distance, it assumes the value between two corresponding pixels is close. On the other hand, the dot product score encourages the image that has high values in both pixels in many corresponding pixel pairs. Though, a real-world image doesn't follow this pattern. For instance, a red color pixel has a high value in the red channel and has low values in the rest. The above methods are likely to fail in matching an image with many red pixels.
To solve this problem, we need to find a feature that is consistent in different channels. We assume that object edges can be observed in all channels. Canny edge detection is a popular edge detection algorithm. It starts with Gaussian filter to remove the noise, find the intensity gradients of the image, apply thresholds to determine potential edges, and finally detect edges by hysteresis thresholding. For more information, refer here.
After applying Canny edge detection, it gives a matrix consisting of only
Method Pseudocode
Our method's pseudocode is presented as follows:
function search_align(c1, c2, search_window, starting_displacement) max_score := 0 best_displacement := (0, 0) c1_edge := Canny_edge_detection(c1) c2_edge := Canny_edge_detection(c2) for displacement in search_window: displaced_c1_edge := shift_pixel(c1_edge, starting_displacement + displacement) score := dot_product_score(displaced_c1_edge, c2_edge) if score > max_score: max_score = score best_displacement = displacement return best_displacement
function pyramid_align(c1, c2): if c1.pixel_count < 100000: return search_align(c1, c2, big_window, (0, 0)) scaled_c1 := rescale(c1, 0.5) scaled_c2 := rescale(c2, 0.5) displacement := pyramid_align(scaled_c1, scaled_c2) return search_align(c1, c2, small_window, displacement)
function align_channels(r, g, b): aligned_r := pyramid_align(r, b) % use b channel as reference aligned_g := pyramid_align(g, b) aligned_image := [aligned_r, aligned_g, b] return aligned_imageThe aligning process starts with align_channels(), which calls pyramid_align() twice to align three channels. pyramid_align() is a recursive function. Its base case calls a search_align() with a large search window. Its recursive cases rescale the two channels to a smaller size and call itself to obtain the displacement on the smaller channel, then call a search_align() with a small search window. search_align() conducts an exhaustive search over two given channels. It first finds the edges of two channels by the Canny edge detection algorithm, and exhaustively computes the dot product score between two channels in the search window.
Bells & Whistles
Automatic Cropping
We conduct automatic cropping after the aligned image is generated. Since there are borders in aligned images, we use the Canny edge detection algorithm to detect them, and find their exact coordinate by diagonally approaching. That is, we start from the left-top point
Automatic White Balance
We implement the "grey world" method mentioned in the lecture slide on page 36. We compute the mean value of each channel and linearly scale them to force the mean value to
Result
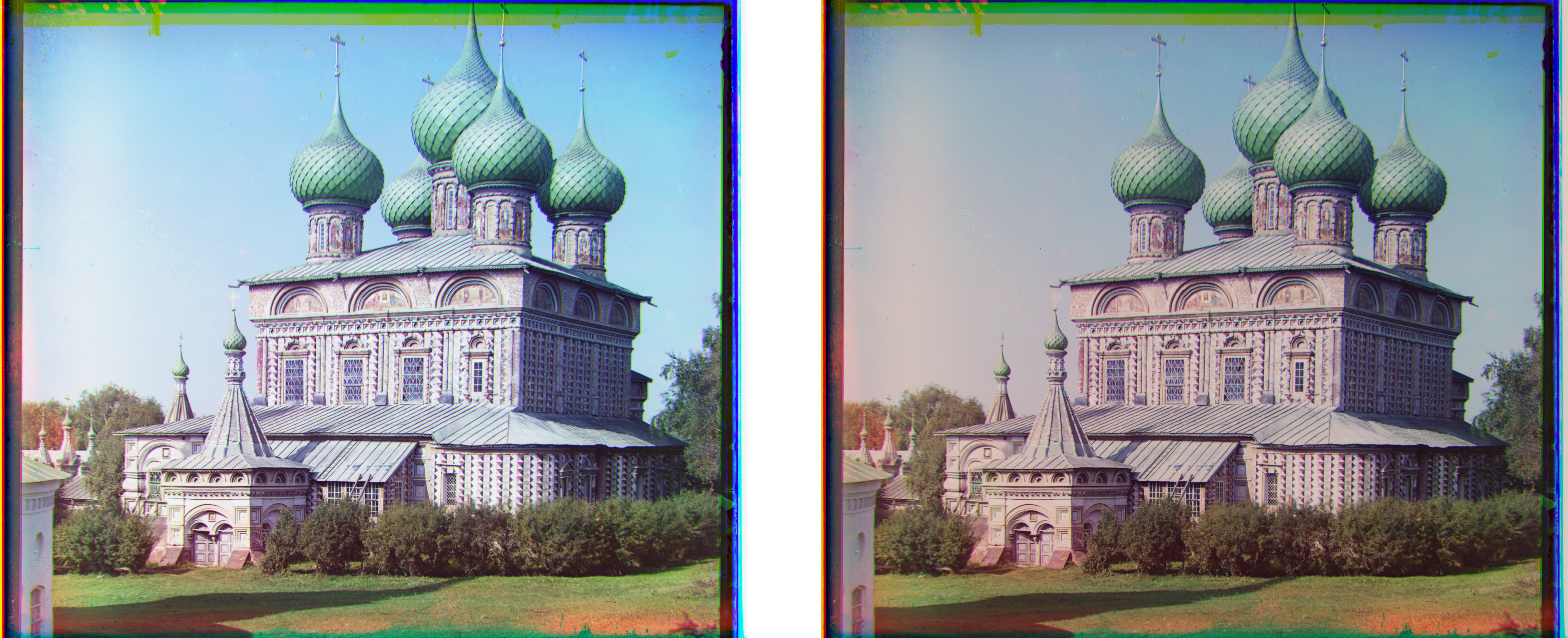
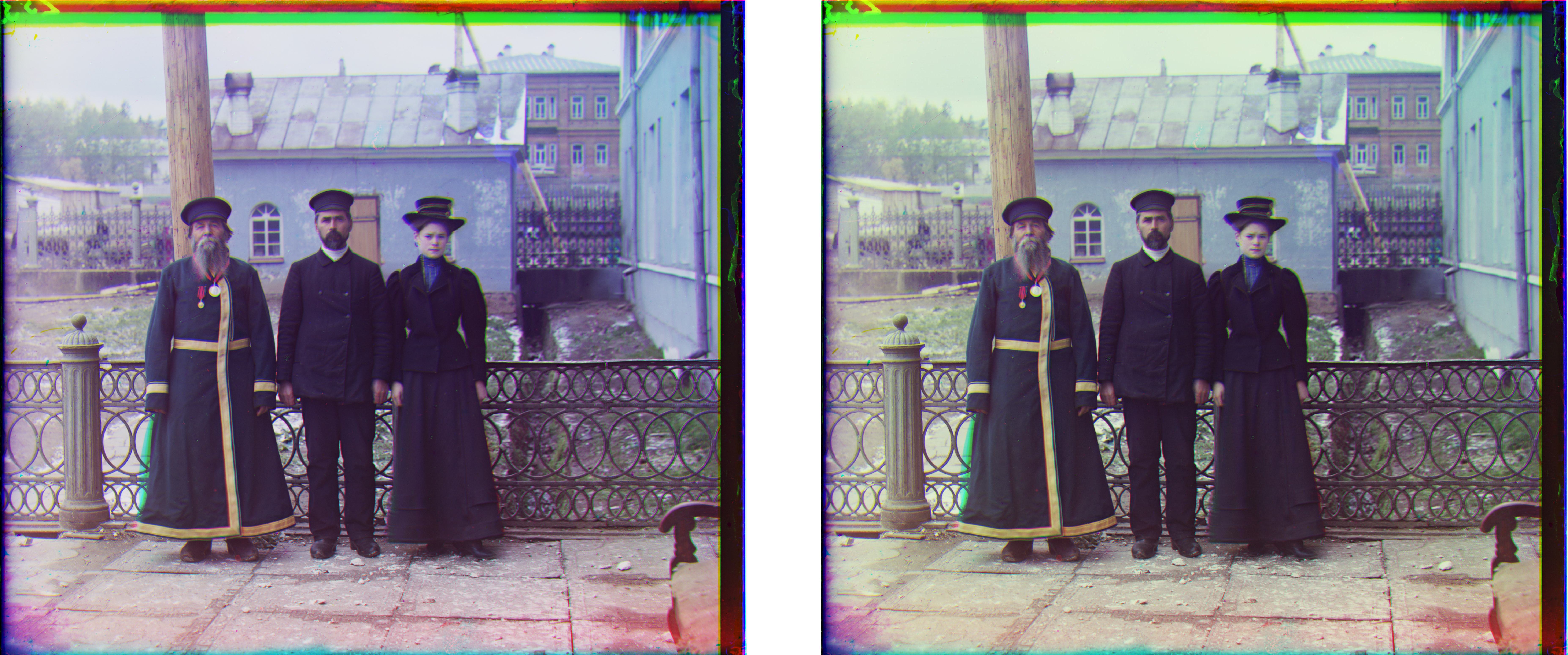
For each image pair below, the left one is the one without automatic white balance while the right one is the one with automatic white balance.




![]()







Offset Table
| Offset | red channel | green channel |
|---|---|---|
| emir.tif | (107, 40) | (49, 24) |
| church.tif | (58, -4) | (25, 3) |
| three_generations.tif | (114, 12) | (56, 12) |
| melons.tif | (176, 14) | (80, 10) |
| onion_church.tif | (107, 35) | (52, 24) |
| train.tif | (85, 29) | (41, 0) |
| icon.tif | (89, 23) | (39, 16) |
| self_portrait.tif | (175, 37) | (77, 29) |
| harvesters.tif | (123, 13) | (60, 17) |
| sculpture.tif | (140, -27) | (33, -11) |
| lady.tif | (120, 13) | (56, 10) |
| cathefral.jpg | (12, 3) | (5, 2) |
| monastary.jpg | (3, 2) | (-3, 2) |
| tobolsk.jpg | (6, 3) | (3, 3) |
Other Images

